


機器視覺技術中“視覺引導定位”深度解析
在工業生產領域,工業機器人的定位與抓取任務占據著舉足輕重的地位。傳統上,工業機器人通常依賴預先示教的方式,嚴格遵循預定指令動作來完成任務。然而,這種方式的局限性十分明顯,一旦工件狀態發生改變,機器人便難以順利完成既定工作,這無疑給工業生產帶來了極大的不便與潛在風險。
在市場需求的強勁推動下,為機器人增添視覺引導功能已然成為機器人領域的熱門研究方向。視覺引導技術通過模擬人類眼睛的工作原理,助力工業機器人精準檢測工件的位置狀態,并利用獲取的視覺信息引導機器人完成定位與抓取任務。這一創新技術極大地克服了傳統工業機器人的固有弊端,顯著提升了工業機器人應用的靈活性與實時性。
從本質層面來講,機器視覺系統在工業環境中發揮著多重關鍵作用,涵蓋引導機器人、測量物品、抓取物品、讀取條碼、字母和數字,以及檢測缺陷等多個方面。在各類機器視覺應用中,無論是最基礎的裝配檢驗,還是復雜的機器人箱子拾取應用,通常第一步都是運用圖案匹配技術,精準定位相機視場內的物品或特征。物品定位的準確性,往往直接決定了機器視覺應用的成敗。

視覺引導機器人定位抓取系統
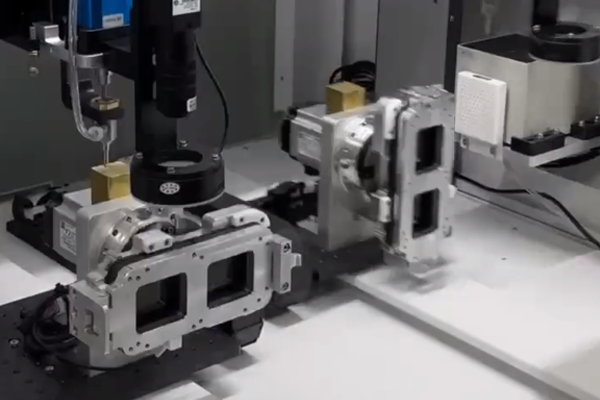
視覺引導機器人定位抓取系統,是借助機器人視覺實現工件抓取點的精準視覺定位,隨后將定位數據傳輸至工業機器人,引導機器人依據視覺信息定位至工件抓取點并完成抓取任務的系統。該系統框架主要由機器人視覺、上位機、工業機器人和抓取目標四部分構成。
其中,機器人視覺系統是核心組成部分,涵蓋相機、鏡頭、光源和視覺軟件。相機負責采集圖像,鏡頭用于聚焦成像,光源提供適宜的照明條件,視覺軟件則對采集到的圖像進行處理,實現工件抓取點的視覺定位。上位機作為數據傳輸樞紐,通過以太網將工件抓取點的位置數據準確發送給工業機器人。最終,工業機器人接收定位數據,借助控制器引導機器人本體運動至工件抓取點,并利用機器人的工具完成抓取、放置工件的任務。

視覺引導與定位功能詳解
機器視覺采用先進的圖像視覺檢測技術,能夠對高速運動的工業產品進行實時、全面的視覺定位分析,這一功能在自動裝配及生產過程中發揮著關鍵作用。
機器人視覺引導:機器人視覺引導主要是利用機器視覺來報告組件的位置和方向。在自動化生產流水線中,機器視覺系統能夠實時監測機器人在操作過程中以及工作環境中的變化,并迅速作出相應調整動作,確保任務能夠正確完成。
機器人視覺定位:機器人視覺定位要求機器視覺系統能夠快速、準確地找到被測零件,并確認其位置。在上下料環節,機器視覺可精準定位,引導機械手臂準確抓取零件。

機器視覺元件定位的重要性
在機器視覺應用中,元件定位是至關重要的一步。如果圖案匹配軟件工具無法在圖像中準確定位元件,那么后續的引導、識別、驗證、計數或測量元件等操作都將無法進行。盡管這一步驟聽起來簡單,但在實際生產環境中,由于照明條件變化或元件被遮擋等因素導致的外觀變化,可能會使元件定位變得異常困難。
雖然視覺系統經過專業培訓,能夠基于圖案來識別元件,但是在嚴格控制的流程中,元件外觀也難免存在一定的變化。此外,元件呈現或姿勢畸變也可能影響元件定位的準確性。為了實現精確、可靠、可重復的結果,視覺系統的元件定位工具必須具備足夠的智能,能夠快速、精確地將培訓圖案與生產線上移動過來的實際物品進行比較,確保定位的準確性。
機器視覺引導在眾多任務中都能夠實現比人工定位高得多的速度和精度,如將元件放入貨盤或從貨盤中拾取元件、對輸送帶上的元件進行包裝、對元件進行定位和對位以便將其與其他部件裝配在一起、將元件放置到工作架上或者將元件從箱子中移走等。這些優勢使得機器視覺引導在工業生產中的應用前景愈發廣闊。




 投訴建議
投訴建議
提交

機器視覺的智能手機包邊應用
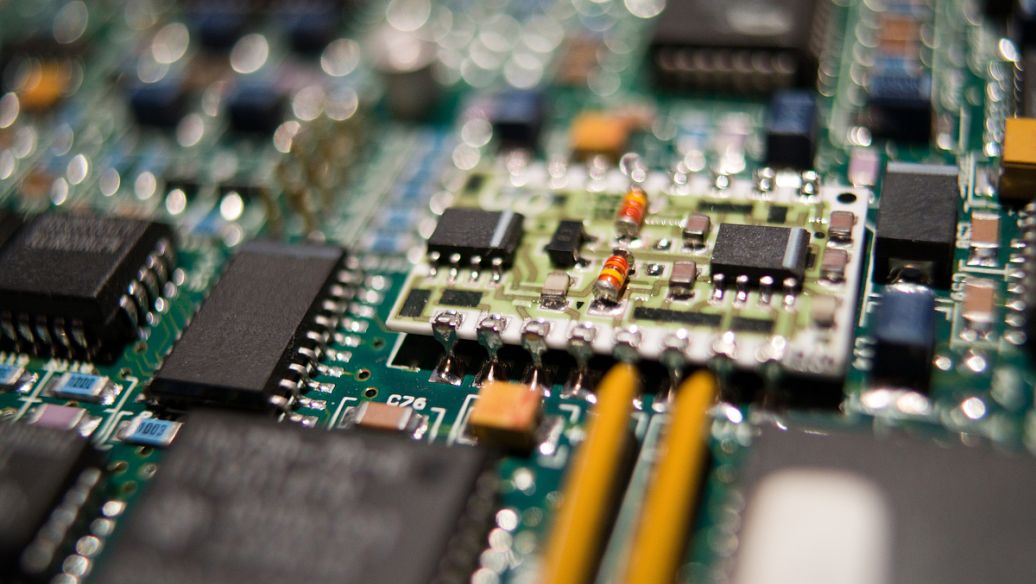
機器視覺的電子元器件激光打標應用
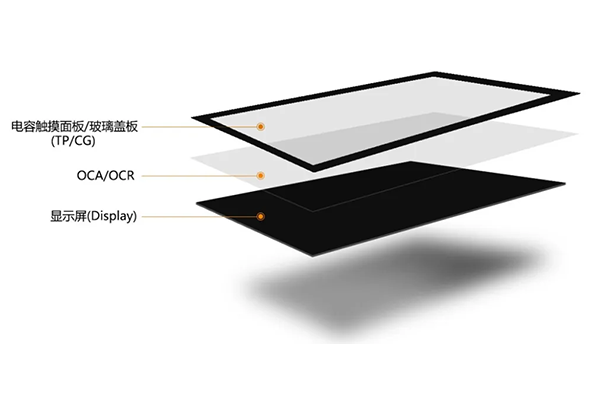
機器視覺引導OCA真空貼合機應用

機器視覺的PC片材薄膜絲印應用
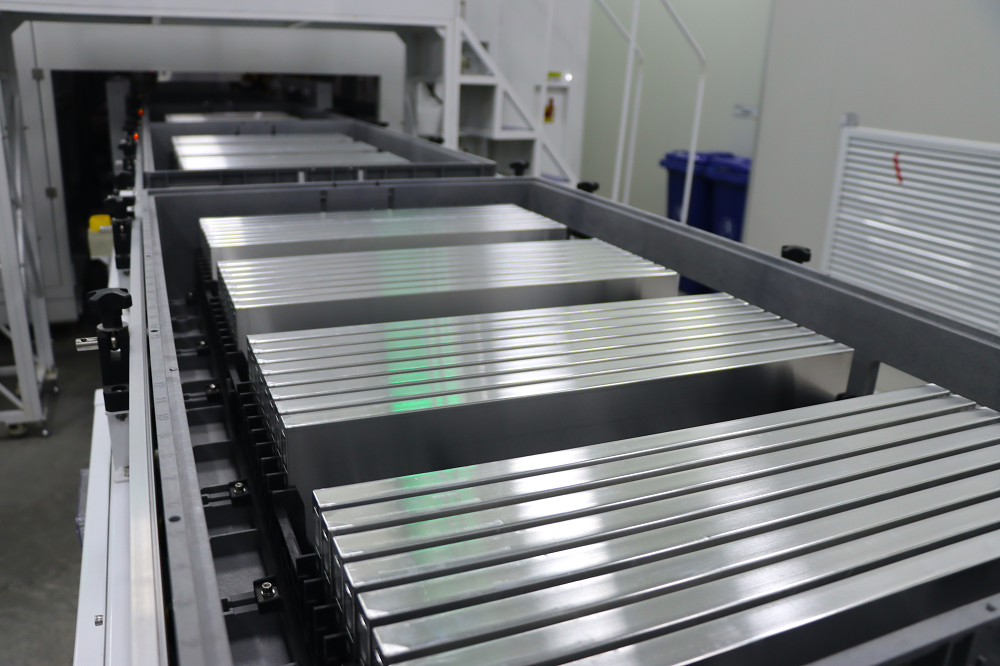
機器視覺的電動車鋰電池疊片應用